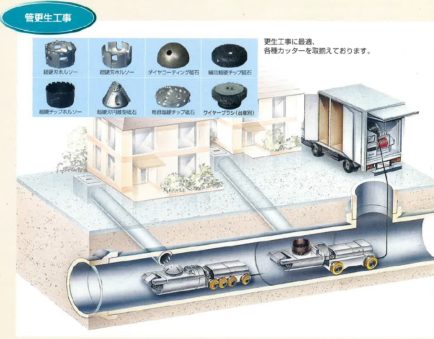
■国内初の下水道維持管理ロボット「北菱キャッチカメラ」の誕生
全国的に下水道の整備が進んだ1980年代、当社はあるお客様から「下水道管理の仕事に協力してほしい」と相談を受けました。特殊車輌の修理で古くから取引があった、福井県の建設会社からでした。当時は下水道の管理方法がまだ確立されておらず、しかも処理水量や下水道施設は増加していたため、下水管の効率的な維持修理が課題となっていました。そこで当社はお客様と共に、新規事業となる下水道維持管理に乗り出したのです。
この新規事業は、当社の金沢事業部のメンバー3、4人によって始まりました。まず下水道管内で、どのようなトラブルが起きているかを調べることからスタート。狭い管内に人が立ち入ることは難しいので、調査カメラを製作して内部の実態を調べたところ、
・管同士をつなぐジョイント部のパッキンの外れ
・木の根の管内への侵入
・工事現場から流れてきたモルタルのたまり
・取り付け管の本管への突き出し(出っ張り)

などが要因となり、汚水の流れを悪くしていたことが判明しました。これらを除去できれば、下水の流れや悪臭なども改善する。そう考えた当社は、遠隔操作で狭い下水道管内の維持管理が行える専用ロボット・カメラの開発に取り掛かりました。
とはいえ、当時は下水道管を修理するロボットなど日本にありませんでした。当社も関連技術は持っておらず、すべてがゼロからのスタート。図面がない中、部品一つ一つが手作りで、ほとんどが現場合わせでの製作作業となりました。
狭い管というバランスを取りづらい環境下で、コンパクトでありながらパワフルな作業を行うための設計が必要という難しい課題が立ちはだかりました。管に入れるための形状と小型化、管内を自走する動力と走行バランス、先端に付けた工具やカメラの動きなど、何度も現場に行き改良を繰り返しました。そのたびに先端部の工具が壊れたり、ロボットに接続したケーブルが外れたりなど、何度もトラブルに見舞われました。それでも、誰も作ったことのないモノを作るというチャレンジ精神と、お客様の要望に応えたいという一心で、全力を尽くして取り組みました。
開発開始から約1年後、度重なる改良を経て、下水道管専用カメラロボットの国産第1号機である「北菱キャッチカメラ(HCC450)」が誕生しました。これはカメラとライトを備えた自走式ロボットで、管内調査のほか先端のアタッチメントにより遠隔操作での施工が可能という、当時(1984年)としては非常に画期的な製品でした。ちなみに、製品名の由来は下水道管内の異物を捕える(キャッチする)ところからきています。


■小口径対応の軽量コンパクトな下水道管補修ロボット「スーパーミニモグ」の誕生
キャッチカメラは、下水道管内の異物を捕えることは得意でしたが、取り付け管の突き出しなどの切削作業を不得意としていました。そのため、当社はすぐに新たなロボットの開発へ着手し、完成したのが「貫通システム(HKS300)」でした。油圧駆動式カッターにより管内の異物を切削できる力強いロボットで、キャッチカメラとの同時販売により需要がさらに拡大しました。後に、キャッチカメラへ切削機能を追加したため貫通システムは存在意義を失いましたが、当社の技術開発史を語る上で外すことのできない重要な位置を占める製品となりました。

2000年ごろになると、耐用年数の50年を経過した下水道管が急増し、下水道管補修の需要が全国で一気に高まりました。その多くは、小口径管の補修需要でした。これは戦後、下水道を広く普及させるために短工期で予算も抑えられる小口径が使われたという経緯があります。そうした背景から、φ200(直径200mm)の口径管で作業できるロボットの需要が出てきました。この頃には下水道の維持管理をメインで行う会社が増えており、そうしたお客様から要望が上がっていました。
ところが、当時の北菱キャッチカメラは最小対応管径がφ250だったため、お客様の要望に応えることができませんでした。また、調査用途や補修作業などマルチに使用できる商品であったため、当時の水準としては高価格に設定せざるを得ませんでした。購入しやすい普及版ロボットの要望を多数寄せられていたこともあり、当社は新たな製品開発に着手しました。
小口径の管に入れるため、自走用タイヤを取り、けん引式に変えるところから開発がスタートしました。タイヤがなくても管内をスムーズに移動させるため、形状を丸くして下部にソリを装着。また、管内検査用カメラが世に普及していたことから、搭載していた調査カメラを外し、その機能をなくしました。カッターの動力については、以前の貫通システムでは油圧を採用していましたが、軽量コンパクトかつシンプルな構造に設計が可能なエアモーターを採用しました。これらさまざまな試行錯誤によって、コストの大幅な低減を果たしました。
一方で、小さくなった機体でも作業時のパワーを落とすわけにはいきません。そのため開発機では、グラインダーの取り付け部が折れるなどして、グラインダーのアーム及びその回転機構の設計に非常に苦労しました。この時には、キャッチロボットの開発メンバーの一人だった宮川大世(元産業機器事業部係長)がリーダーとして他のメンバーを引っ張り、開発を推進していきました。
仕様の図面化や標準化による試作品作り、模擬管によるテストを重ねたほか、装置の配置、部品構成などの設計、機体下部のソリ形状、穿孔(せんこう=穴を開けること)機能に特化したシンプルな構造など、製品の構想を最後までとことん突き詰めていきました。
そして2004年ごろ、4人の技術者により、1年以上の開発期間を経て、ようやく市販化にこぎ着けることができました。市場のニーズに合わせた下水道管専用ロボットの新製品 「スーパーミニモグ」 の誕生でした。
最終的に、スーパーミニモグは目標(φ200口径)を上回るφ150口径まで対応できる、軽量かつコンパクトな下水道管補修ロボットに仕上がりました。完成したとき、リーダーの宮川を含む4人の技術者たちは使命を全うした安堵感でいっぱいになったと言います。また、当時の社長やお客様からの喜びの声が何よりうれしかったそうです。

■未来の下水道管理ロボットの構想、そしてHOKURYOの想い
これまで当社は、お客様の声に応えるため製品開発を行ってきました。スーパーミニモグについても、さまざまな管径に対応してほしい、オプションのカッター刃を増やしてほしいといったご要望に対応してきました。手頃な価格のベースロボットにさまざまなオプションを追加することで、幅広いニーズにお応えする。そのベースとして、スーパーミニモグはまだまだ多くの可能性を秘めています。
今後も、「どこにでも入っていける」「高い穿孔能力を持つ」など、より高性能・高機能なロボットを求める多種多様なニーズが予想されます。そのようなお客様の一人一人の声にしっかりと耳を傾け、フレキシブルに市場のニーズを捉えた製品を開発していく。その信念は、これからも変わりません。
また、当社は新しいことへチャレンジすることも忘れません。製品の海外展開もその一つです。そのためには、いかにお求めやすい価格で提供できるかが重要となるでしょう。より良い製品をより安く、不可能を可能にすることを目標に、製品開発へ取り組みたいと考えています。
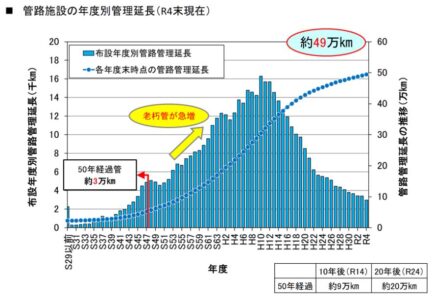
全国の下水道管渠(かんきょ)の総延長距離は約49万km(2022年度末、国土交通省調べ)と、今なお増え続けています。このうち耐用年数50年を経過した管渠は約3万km(総延長の6%)で、10年後は9万km(同18%)、20年後には20万km(同41%)と、今後は急速な増加が見込まれています。
また、老朽管の破損による大規模な道路の陥没事故も社会的な問題になっています。

下水道管の補修工事は、これからもまだまだ需要が増えていくことが予想されています。増え続けるニーズへ応えていくには、今よりもさらに作業性の高い下水道ロボット・カメラの登場が必要となるでしょう。
人々の衛生的で快適な暮らしは、下水道管理ロボットの開発がカギを握っている――私たちはそう信じています。


